1 min to read
Let's Do Mapping Using SLAM
SC-LeGO-LOAM을 이용한 DGIST 원내 매핑

우리 연구팀은 위치 측위에 RTK-GNSS를 사용한다. 그러나 기상 상황이 좋지 않거나, 터널 등의 도로 환경에서는 위치 정확도가 떨어지는 문제가 발생하였고, 이를 해결하고자 LiDAR 기반의 SLAM을 도입하고자 하였다.
사용하고자 한 SLAM은 SC-LeGO-LOAM이다. SC-LeGO-LOAM은 LeGO-LOAM을 기반으로, Scan Context를 결합한 것이다.

자율주행 연구 차량인 아이오닉 일렉트릭 천장에 부착된 VLP-16을 이용하여 mapping을 진행하였다.
(mapping 영상, 클릭시 Youtube로 이동)

만들어진 point cloud map의 스크린샷이다.
이 point cloud map을 osm 포맷의 기존 HD Map과 맞추고자, UTM 2D 좌표계에 투영하였다.

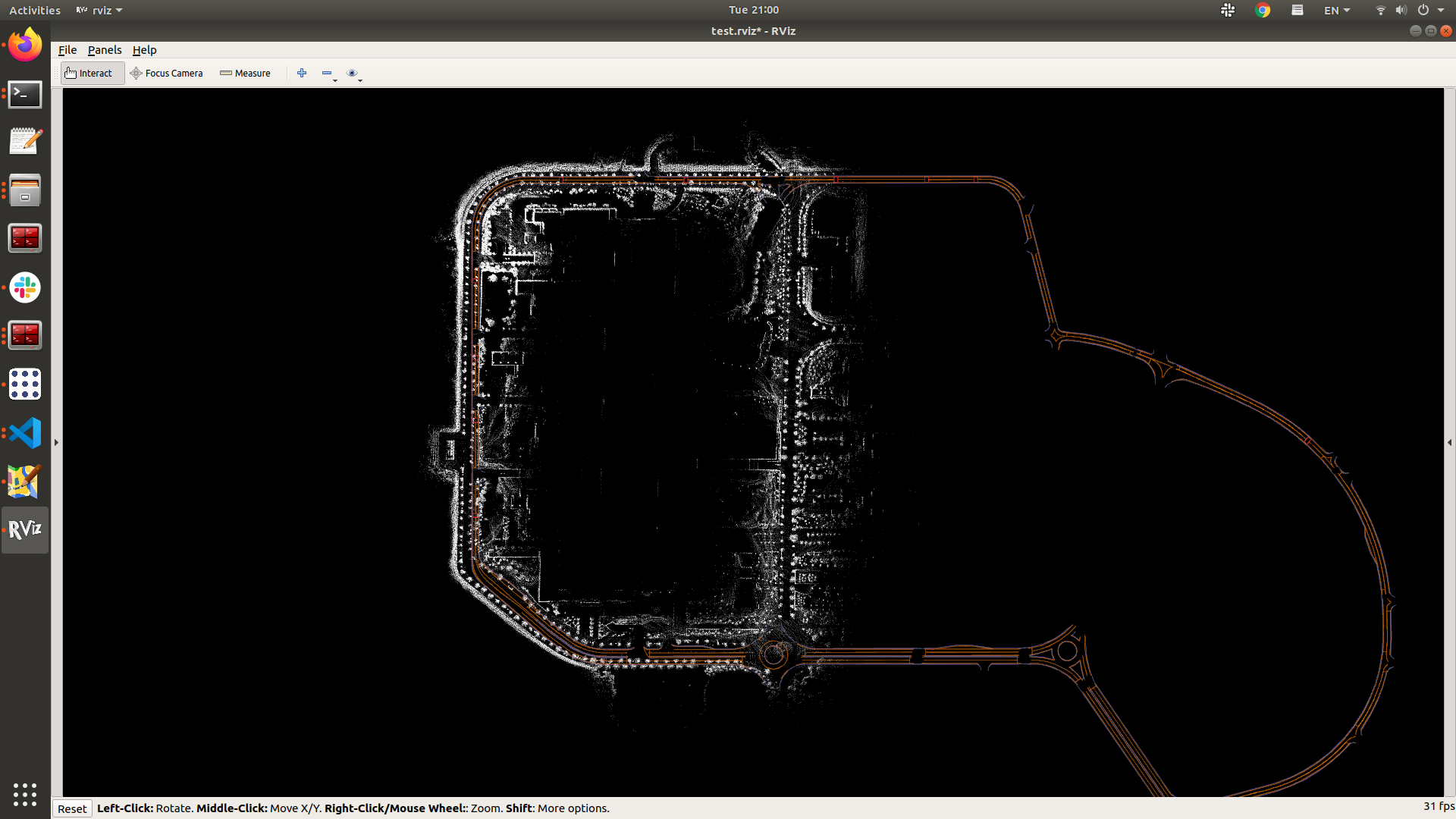
osm맵은 osm_cartography를 활용하여 rviz상에 시각화화였다.
SLAM을 기반으로 만들어진 map이 있으니, 이를 바탕으로 localization이 가능해졌다.
RTK-GNSS에서 제공하는 정보와 형태를 맞추기 위해, SLAM에서 나오는 상대좌표를 위도 경도 좌표계로 변환하였다.
Point Cloud Map상의 특정 위치들에 대한 위도와 경도를 사전에 입력하여, SLAM을 기반으로 한 위도, 경도 좌표를 얻을 수 있었다.


(localization 영상, 클릭시 Youtube로 이동)
RTK-GNSS 위치 정보의 HDOP가 높을 경우, SLAM을 통한 위치 정보에 가중치를 두는 방식으로 localization을 수행하였다.
그러나 이후, LiDAR에 틸팅 각도를 주고 위치를 변경하는 등 SLAM을 활용하기 어려운 상황이 되어, 현재는 RTK-GNSS와 비전 정보를 기반으로 자율주행을 하고 있다.
